Cyber-Physical Systems
The term Cyber-Physical System (CPS) is used to describe dynamic systems which combine components characterized by a physical state (e.g., the location, power level, and temperature of a mobile robot) with components (mostly digital devices empowered by software) characterized by an operational state or mode (e.g., on/off, transmitting/receiving). From a modeling point of view, physical states evolve according to time-driven dynamics commonly described through differential (or difference) equations, while operational states have event-driven dynamics where events may be controllable (e.g., a turn on command) or uncontrollable (e.g., a random failure). Imparting intelligence to a CPS implies the presence of multiple additional events that correspond to actions such as “start moving” for a mobile robot or “change sampling rate” for a sensor. These physical and operational states generally interact to give rise to a hybrid dynamic system. For example, a sensor with autonomous control capabilities may switch to a data transmitting mode as a result of a particular physical state change (e.g., its residual energy drops below a certain threshold).
Smart Cities are an example of CPS currently attracting considerable attention, as 66% of the world’s population is projected to be concentrated in urban areas by 2050. An important component of Smart Cities is their transportation network for which new mobility paradigms are under development, including Connected Autonomous Vehicles (CAVs) and new Mobility-on-Demand System (MoDS).
There are several projects in our research group which address issues in CPS including several that focus on networked cooperating Autonomous Vehicles:
A Cyber-Physical Infrastructure for the “Smart City”
Real-Time Optimization in Complex Stochastic Environments
Dynamic Resource Allocation for Energy-Efficient Urban Mobility
New Driving Models and Controllers for Connected Autonomous Vehicles
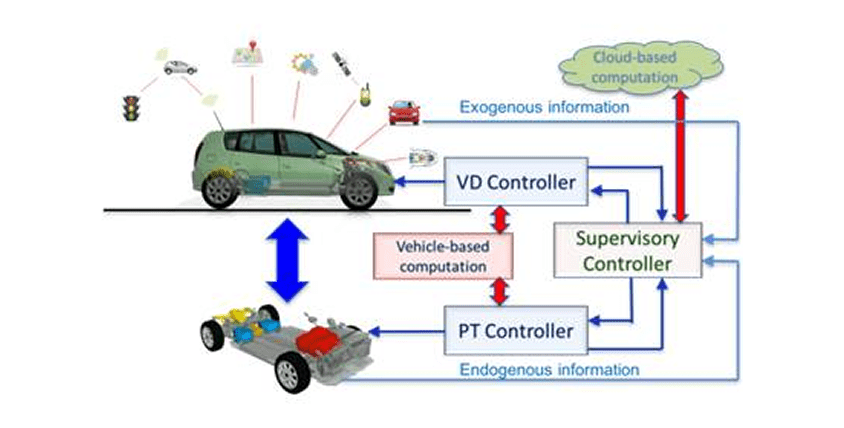
Simultaneous Optimization of Vehicle and Powertrain Operation Using Connectivity and Automation
A Dynamic Optimization Framework for Connected Automated Vehicles in Urban Environments
Improving Highway Traffic Mobility with a Safe Swarm of Smart Vehicles
Real-Time Distributed Optimization in Networked Multi-Agent Systems
Decentralized optimal control of cooperative networked multi-agent systems

